Cálculo de reacciones internas (solicitaciones) mediante el Principio del Trabajo Virtual para Cuerpos Rígidos
¡Saludos a todos! Bienvenidos a la presente publicación, la cual es la 2° parte del contenido referente al Principio del Trabajo Virtual para Cuerpos Rígidos (PTVCR). En la primera parte se realizó un abordaje teórico-práctico de la aplicación del PTVCR en el cálculo de reacciones externas de sistemas isostáticos sometidos a un sistema de cargas externas en equilibrio. En la presente publicación, me gustaría compartir mediante la misma didáctica, la aplicación del PTVCR en el cálculo de las reacciones internas (solicitaciones) así como realizar un abordaje del significado de las solicitaciones en los sistemas isostáticos. Abajo el enlace de la 1° parte de la presente publicación.
Cálculo de reacciones externas mediante el Principio del Trabajo Virtual para Cuerpos Rígidos
Los Diagramas Cartesianos de Desplazamiento son necesarios para la ejecución del PTVCR, en las siguientes publicaciones previas a esta se abordaron dichos diagramas:
•Diagramas cartesianos de desplazamiento y aplicación al principio de los trabajos virtuales (acá se aborda el PTVCR de manera simplificada).
•Diagramas cartesianos de desplazamiento en sistemas materiales de 1 grado de libertad
•Diagramas cartesianos de desplazamiento: uso del diagrama auxiliar
En Estática Aplicada, los estudiantes empiezan a ver la base del análisis estructural mediante el cálculo de solicitaciones tales como momentos flectores, fuerzas axiales y fuerzas cortantes sobre elementos de sistemas isostáticos. Esto constituye la práctica inicial del análisis de sistemas estructurales y la forma en que las cargas influyen sobre las solicitaciones. Quizás empezar a calcular solicitaciones mediante el principio de los trabajos virtuales no es lo más usual, pero lo ideal es entender primero que son y como son generadas.
Todo el contenido sobre Estática Aplicada UCV se ha recopilado en la siguiente publicación:
Introducción
Cuando un sistema isostático se somete a un sistema de cargas externas en equilibrio, se generan en los vínculos de apoyo a tierra reacciones externas como consecuencia de la restricción que los mismos imponen al movimiento que las cargas externas intentan generar sobre el sistema. En consecuencia, mientras mayor sean las cargas externas, mayores serán las reacciones externas, ya que el sistema se encuentra en equilibrio y ese equilibrio se conserva mientras la sumatoria de fuerzas y momentos flectores en todo el sistema sea igual a cero. Pero mientras esto ocurre, también sucede algo internamente en el sistema. Las vinculaciones internas están transmitiendo fuerzas de una chapa a otra, con el objetivo de mantener el equilibrio interno del sistema. Para que el sistema entero esté en equilibrio, también debe existir equilibrio de fuerzas en cada una de las chapas (eslabones o cuerpos rígidos) del mismo, y este equilibrio de fuerzas en una chapa se da entre las cargas externas aplicadas a ella y las cargas que esta transmite a las chapas con las cuales se vincula, por supuesto, a través de las vinculaciones internas.
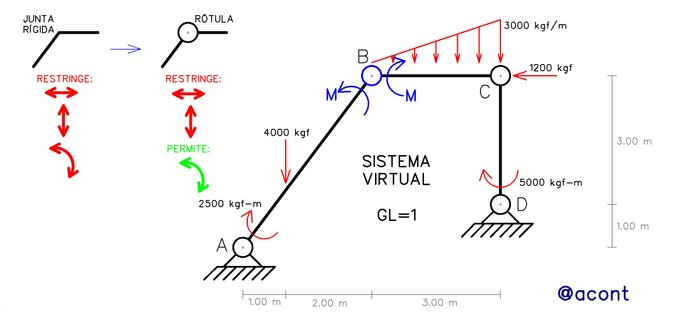
Los vínculos internos transmiten reacciones de una chapa a otra y al igual como sucede con los vínculos externos y sus reacciones, dichas reacciones vienen representadas de manera directa por las restricciones que el vínculo interno posea. Por ejemplo, si el vínculo interno entre dos chapas restringe la rotación relativa entre ellas (como es el caso de una junta rígida) entonces existirá una reacción interna de momento flector transmitiéndose entre ambas chapas. Pero si la vinculación interna permite a ambas chapas rotar una respecto a la otra libremente sin fuerzas de roce, no se transmitirá el momento flector de una chapa a la otra (rótula o articulación interna).
Pero no solamente existen fuerzas actuando en las vinculaciones externas e internas de un sistema isostático sometido a cargas. Toda chapa al ser sometida a cargas externas, empieza a experimentar fuerzas internas, las cuales “fluyen” a través de ella, por decirlo de alguna manera. Dichas fuerzas internas también están en equilibrio con las demás, y son las que denominamos “solicitaciones”.
Conceptos básicos
Además de los conceptos base mencionados en la Parte I de esta publicación, se introducen los siguientes, para un mayor alcance en esta lectura.
En consecuencia, cada vez que lea que un sistema isostático está siendo “solicitado” por cargas externas, se refiere a que dichas cargas generan internamente sobre las chapas del sistema solicitaciones (fuerzas axiales, fuerzas cortantes y/o momentos flectores).
Características de solicitación
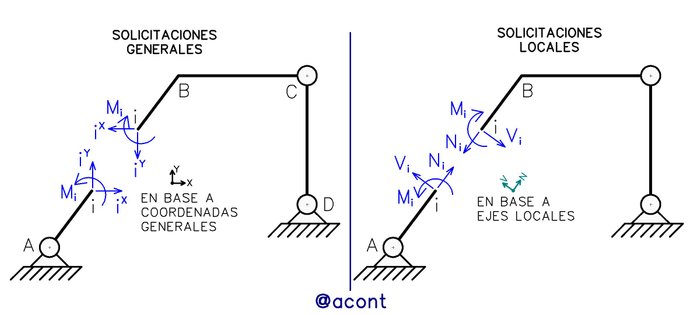
La bibliografía disponible habla de “solicitaciones generales” y “solicitaciones locales”. Las primeras se refieren a las reacciones internas (fuerzas puntuales) que están orientadas de forma paralela a los ejes “X” y “Y” convencionales, es decir, sin importar la orientación de una barra (chapa) siempre se refieren a las reacciones internas que son horizontales o verticales. En la anterior publicación se optó por utilizar un “sistema global” para el análisis de las reacciones externas, similar al usado para las solicitaciones generales.
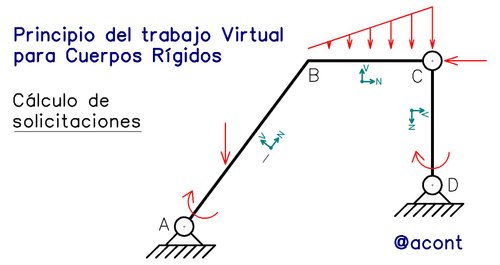
En la presente publicación, solo utilizaremos el sistema de referencia dado por las solicitaciones locales, el cual viene dado por un eje longitudinal (axial) y un eje perpendicular a la barra en cuestión, por lo que cada barra o chapa del sistema posee un sistema de ejes locales independiente. Las fuerzas axiales, las fuerzas cortantes y el momento flector son solicitaciones locales. En la Fig. N°1 se observa un sistema isostático solicitado por un sistema de cargas externas. Cada barra posee su sistema de referencia local (ejes locales).

Se realiza un corte en algún punto cualquiera “i” dentro una de las barras, de esta manera se generan dos “subsistemas”. Para mantener el equilibrio estático en cada “subsistema”, deben existir reacciones internas en cada punto de corte, las cuales se equilibran con las reacciones externas y las cargas externas. Para poner en evidencia la diferencia entre las solicitaciones generales y las solicitaciones locales, en la Fig. N°2 se muestra una imagen de ambos casos.
En la Fig. N°2 se observa que las reacciones internas se transmiten de un subsistema a otro en igual magnitud y sentido opuesto. Esto es así ya que de esta forma se mantiene el equilibrio interno en el sistema. Si nos enfocamos en un elemento diferencial de cualquiera de las barras tomando como referencia el sistema de solicitaciones locales, podemos observar lo siguiente (Fig. N°3).
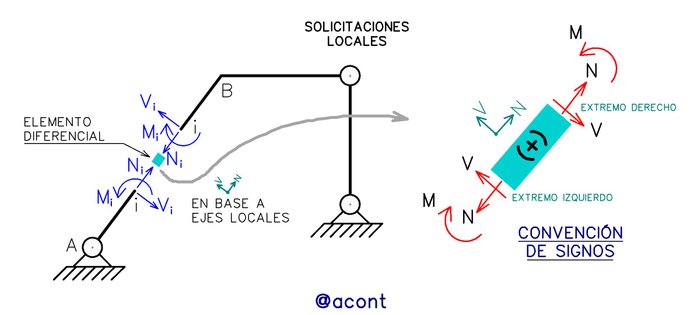
Esta es la convención de signos usual a utilizar para las solicitaciones locales:
Aunque en esta publicación no me enfocaré en el estudio detallado de las solicitaciones (diagramas de solicitaciones), vale la pena abordar una convención de signos para así tener una mayor sensibilidad acerca del signo del resultado final cuando apliquemos el PTVCR. En temas más avanzados de Ingeniería Civil, y en programas computacionales de Análisis Estructural, la convención por defecto utilizada para el signo de las solicitaciones locales es al revés para el caso de las fuerzas cortantes y los momentos flectores. Sin embargo, la convención de signos utilizada usualmente en Estática Aplicada es la que se ha mostrado en la Fig. N°3.
Aplicación del P.T.V.C.R. en el cálculo de reacciones internas
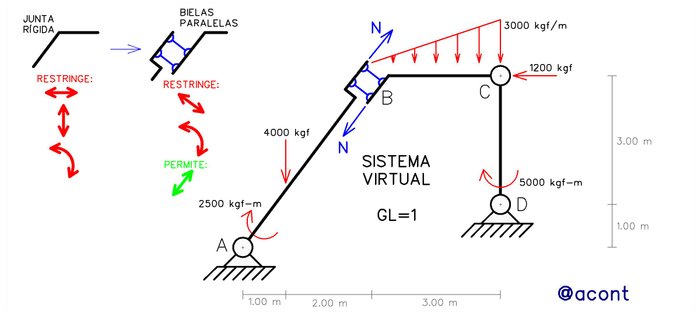
Cabe aclarar que una “reacción interna” es un término general para referirse a cualquier solicitación. Quizás sería más preciso decir que aplicaremos el PTVCR en el cálculo de solicitaciones locales. Es decir, utilizaremos el mismo principio del trabajo virtual abordado en la publicación anterior, solo que en este caso calcularemos momentos flectores, fuerzas cortantes y fuerzas axiales en algún punto específico interno de un sistema isostático sometido a cargas externas. En este sentido, a través del ejemplo mostrado en la Fig. N°1, se ilustrará el proceso para el cálculo de reacciones internas o solicitaciones mediante el PTVCR.
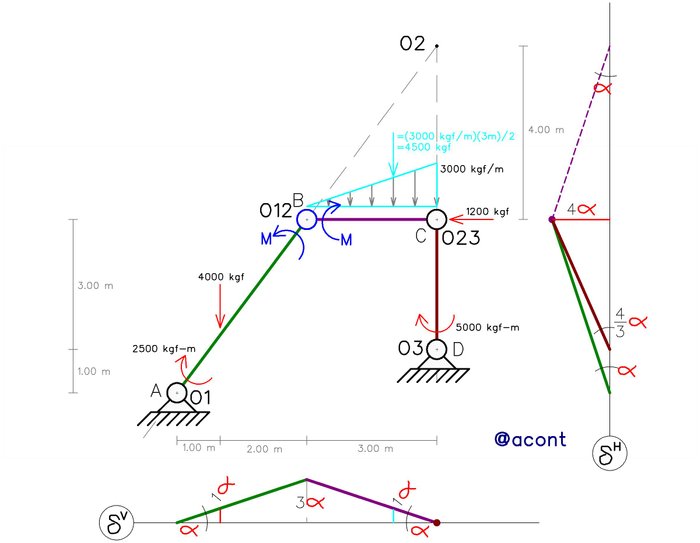
El sistema isostático mostrado en la Fig. N°1 está solicitado por cargas externas y se pretende calcular el momento flector que existe internamente en la junta rígida “B” producto del sistema de cargas existente. Debemos utilizar el mismo análisis realizado en la anterior publicación (reacciones externas), solo que en este caso observaremos una vinculación interna (junta rígida). Las reacciones están representadas de manera directa por las restricciones del movimiento. Entonces el momento interno (momento flector) viene dado por la restricción de la rotación que la junta rígida proporciona. Por consiguiente, podemos asumir que el momento flector que existe internamente en esa junta rígida pasa de ser una reacción interna a ser una carga externa cuyo valor es desconocido (reacción incógnita). Esto supone que la restricción de rotación relativa que la junta rígida impone entre ambas barras es eliminada, dejando libre la rotación relativa de una barra respecto a la otra. Esto implica una “transformación” en dicho vínculo interno, de una junta rígida a una rótula.
El sistema original, el cual se encuentra en equilibrio, pasa a ser un mecanismo de un (1) grado de libertad al eliminar una de sus restricciones o unidades de vinculación internas (Fig. N°4). Recordemos que, para mantener el equilibrio interno del sistema, la reacción interna siempre debe representarse en ambos “subsistemas” en igual magnitud y sentido opuesto. Es por ello que en la Fig. N°4, el momento incógnita se observa a ambos lados de la rótula impuesta en donde previamente se encontraba la junta rígida.
Para estos momentos incógnita se ha asumido un sentido de acuerdo a la convención de signos abordada anteriormente, por lo que, de acuerdo a los ejes locales asumidos, el momento flector en el extremo izquierdo de la barra “BC” tiene sentido horario, mientras que el que se encuentra en el extremo derecho de la barra “AB” posee sentido anti horario. De esta manera, si el resultado final es positivo, ya sabemos directamente que el momento flector es positivo según la convención se signos.
De igual manera que para el cálculo de reacciones externas, se deben realizar los Diagramas Cartesianos de Desplazamiento del mecanismo virtual de un (1) grado de libertad creado.
Recordemos el enunciado de John Bernoulli quien desarrolló el Principio de los Trabajos Virtuales para Cuerpos Rígidos en 1777: ”Si sobre un cuerpo rígido actúa un sistema de cargas externas en equilibrio, el trabajo realizado por dichas cargas cuando el cuerpo sufre un desplazamiento virtual es igual a cero”. De aquí surge la ecuación fundamental para el cálculo de reacciones mediante el PTVCR (ecuación (2) de la anterior publicación):

De acuerdo a esta expresión, para calcular la reacción incógnita debemos calcular los trabajos virtuales que realizan todas las cargas externas sobre el sistema (incluyendo a la reacción incógnita). Esto se realiza multiplicando cada carga externa por su desplazamiento virtual correspondiente en su punto de aplicación (o rotación virtual de la chapa correspondiente para el caso de cargas externas de momento). En la Parte I se abordaron los detalles a tomar en cuenta para el correcto cálculo del trabajo virtual de cada una de las cargas externas, y se utilizó para esto la ecuación (1) de dicha publicación:

En consecuencia, una vez realizados los diagramas cartesianos y habiéndose calculado todos trabajos virtuales, se utiliza la expresión (1) de la anterior publicación para calcular la sumatoria de los trabajos virtuales y luego despejar la incógnita igualándola a cero tal como lo dice la ecuación fundamental del trabajo virtual. (Fig. N°5).
Realizando la sumatoria de los trabajos virtuales e igualándola a cero, obtenemos el valor de “M”:
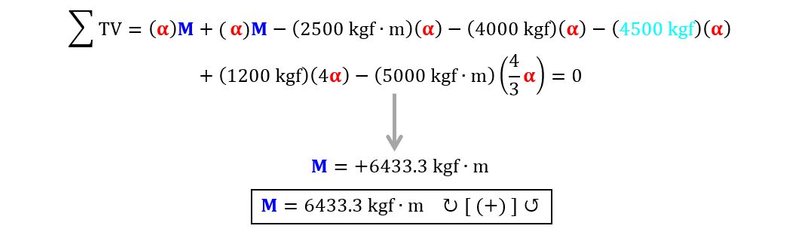
El parámetro “α” que surge de los diagramas cartesianos se cancela al ser un término común, dejando como única variable a despejar la reacción incógnita deseada. El valor obtenido no es más que el valor del momento incógnita que hace que el mecanismo virtual se encuentre en equilibrio (sumatoria nula de trabajos), ya que de esta manera estamos compatibilizando el “sistema virtual” (que es capaz de moverse) con el sistema original (el cual no se mueve).
Esta forma de proceder es similar para todos los casos, es posible que la dificultad a la hora de hallar polos y realizar los diagramas cartesianos sea mayor en otros sistemas con un arreglo distinto, pero seguramente lo que resulta menos evidente al realizar este tipo de ejercicios es seleccionar la vinculación correcta cuando se va a sustituir una de las vinculaciones internas del sistema original ya que al calcular otras reacciones internas (solicitaciones) como fuerzas cortantes o axiales no se colocan rótulas sino otros vínculos internos.
Análisis de vinculación interna. Sistema Local
La vinculación a utilizar en sustitución de la original va a depender de que reacción interna deseemos calcular y para identificar de manera satisfactoria la vinculación correcta, debe hacerse un análisis particular de las restricciones internas en el punto de interés del sistema isostático.
De acuerdo a la convención de signos para las solicitaciones locales utilizada en la Fig. N°3, tenemos para cada barra del sistema un sistema de ejes locales, en donde tenemos una dirección paralela al eje de la barra (para fuerzas axiales) y otra perpendicular a la misma (para fuerzas cortantes).
Ya vimos en el ejemplo anterior que, si queremos calcular el momento flector en determinado punto interno del sistema, debemos colocar una rótula en dicho punto, asumiendo que la restricción interna de la rotación deja de actuar internamente para formar parte de las cargas externas. La excepción al caso se da en las rótulas mismas del sistema original o cualquier otra vinculación que no restrinja la rotación, puesto que ya sabemos que el momento flector en dicha vinculación es nulo, ya que el sistema virtual sería idéntico al original y al no poder presentar desplazabilidad ninguna carga podría realizar trabajo.
Para el caso de las reacciones o fuerzas internas (axiales y cortantes), la restricción interna que nos interesa liberar o eliminar es la restricción de desplazamiento. Si nos interesa calcular la fuerza cortante en determinado punto de una barra, debe de liberarse el desplazamiento en dirección perpendicular a la barra en dicho punto dejando el resto de las restricciones tal como estaban en el sistema original. De esta manera, tomando el ejemplo ya abordado, el sistema virtual para el cálculo de la fuerza cortante en el punto “B” para la barra “AB” se da tal como se muestra en la Fig. N°6.
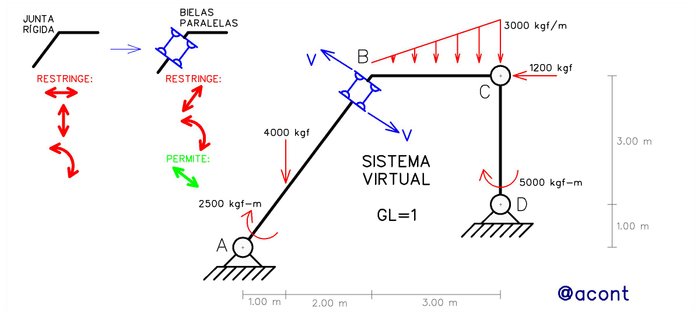
La vinculación interna que restringe la rotación relativa y permite una dirección de desplazamiento son las bielas paralelas. Para garantizar el equilibrio interno en el sistema, la fuerza cortante incógnita se ha colocado a ambos lados de las bielas paralelas, en igual magnitud y sentido opuesto, además posemos observar que el sentido de estas fuerzas cortantes se ha asumido para el caso de fuerza cortante positiva según la convención de signos abordada anteriormente (hacia “abajo” en el extremo derecho de la barra en cuestión). Puesto que cada barra seguramente experimentará desplazamientos virtuales de diferente magnitud y sentido, ambas fuerzas “V” realizarán trabajos virtuales diferentes, pero al final nos interesa despejar un valor de “V” que le de equilibrio al sistema virtual y sea la fuerza cortante actuante en el sistema original para dicho punto de la barra. Ya que las fuerzas “V” están inclinadas, se descomponen en sus direcciones horizontal y vertical, para así calcular el trabajo que realizan ambas fuerzas en dichas direcciones.
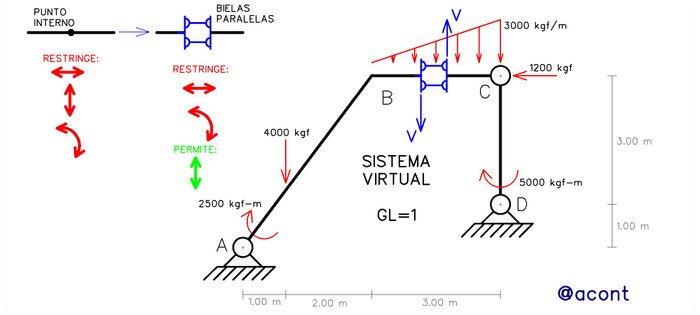
Si el punto “B” fuera una rótula en el sistema original, entonces sería errado colocar las bielas paralelas, pero esto lo detallaré más adelante. Supongamos que ahora nos interesa calcular la fuerza cortante justo en la mitad de la barra “BC”, el sistema virtual nos queda como sigue (Fig. N°7).
Para el cálculo de la fuerza axial, el principio es el mismo que con la fuerza cortante, solo que la dirección de desplazamiento a liberar pasa a ser la dirección longitudinal de la barra, por lo que las bielas paralelas ahora se encuentran giradas 90° y las fuerzas incógnitas “N” también. En la Fig, N°8 se muestra el sistema virtual para el cálculo de la fuerza axial en el extremo “B” de la barra “AB”.
Puede que este sistema se vea complicado en cuanto a la realización de los diagramas cartesianos, y la dificultad podría radicar en la búsqueda de los polos, pero siguiendo los pasos usuales para la búsqueda de los mismos y la ejecución correcta de los diagramas cartesianos se logra llegar al resultado.
En resumen, siempre que nos interese calcular una solicitación local en una junta rígida (o cualquier punto interno de una barra) debemos colocar una rótula o unas bielas paralelas en dicho punto dependiendo si nos interesa el momento flector o una fuerza cortante o axial respectivamente. Pero ¿Qué vínculo se coloca si en el extremo de una barra hay una rótula y nos interesa calcular la fuerza cortante/axial en ese punto?
Este y otros casos particulares pueden presentarse. Lo ideal es revisar las restricciones existentes, eliminar la que nos interese y buscar un vínculo que nos provea las restricciones restantes. En el artículo Estática Aplicada: los Vínculos y su Aplicación a Sistemas Estructurales en la Realidad se da mayor información acerca de los vínculos y sus restricciones.
En la siguiente tabla compartiré un esquema de las vinculaciones internas a utilizar en sustitución de la original en función de la solicitación que deseemos calcular.
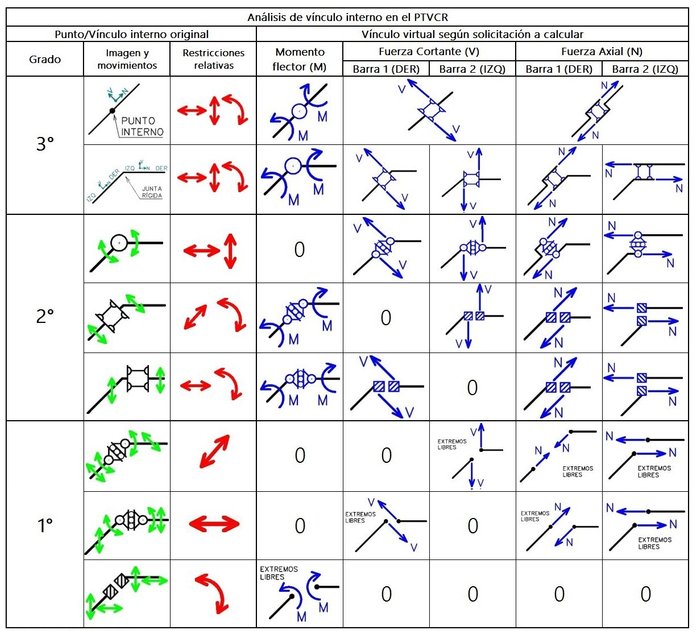
Si bien algunos de los casos mostrados en la tabla realmente son muy poco usuales o bien no corresponden a nada parecido en estructuras de la realidad tal como mencioné en la Parte I (reacciones externas), no viene mal brindar un esquema general de todas las posibilidades.
Disposiciones finales
Existe un detalle a tener en cuenta: el momento flector en una junta rígida es el mismo para el extremo de todas las barras que concurren a dicha junta (excepto en el caso de que exista un momento externo aplicado justo en la junta rígida). Por otro lado, las fuerzas cortante y axial en una junta rígida están particularizadas para el extremo de cada barra (es por eso que en la Fig. N°8 las bielas paralelas se colocaron en el extremo de la barra “AB” y no precisamente en la junta ya que nos interesaba el extremo de dicha barra).
Las solicitaciones son un tema de suma importancia en la Ingeniería Civil ya que en base a ellas se realiza el diseño de elementos estructurales tales como: vigas de concreto armado, vigas de acero estructural, losas, muros, puentes, etc. Si bien existen otros tipos de solicitaciones no abordadas en esta publicación, el momento flector, la fuerza axial y la fuerza cortante son las más usuales, y la magnitud de estas determina las dimensiones que dichos elementos estructurales tendrán, es por ello que las vigas de una casa son mucho más pequeñas que las vigas de un edificio o de un puente, ya que la estructura de la casa está siendo solicitada por cargas de menor magnitud.
Para finalizar, debo destacar el uso Principio del Trabajo Virtual para Cuerpos Rígidos como alternativa a las ecuaciones de equilibrio estático para el cálculo de reacciones tanto externas como internas, ya que permite llegar al mismo resultado por un camino notablemente diferente. En las siguientes publicaciones, abordaré el uso de las ecuaciones de equilibrio estático para el cálculo de reacciones externas aplicado a sistemas isostáticos, así como el despiece de los mismos para poner en evidencia las reacciones en sus vínculos internos. Dichas ecuaciones son muy fáciles de aplicar, pero existen sistemas isostáticos cuya complejidad requiere ciertos análisis previos para así llegar satisfactoriamente a la solución.
Conclusiones
Referencias Bibliográficas
[1]Hernández, Suilio. (1998). Estática Aplicada. Folleto Editado por el Departamento de Ingeniería Estructural U.C.V. Caracas. (p. 61-65).Fuente
[2]Luchsinger, Cecilio. (1976). Estructuras (Volumen I). Folleto de Estructuras N°4. Departamento de Ingeniería Estructural U.C.V. (pág. 32)Fuente
[3]Rodríguez, Iván. (2003). Estática de las Estructuras. (p. 72-82).Fuente
Material recomendado
•Estática Aplicada: los Vínculos y su Aplicación a Sistemas Estructurales en la Realidad
•ESTÁTICA APLICADA: bielas paralelas en sistemas materiales de 1 grado de libertad Parte I
• ESTÁTICA APLICADA: bielas paralelas en sistemas materiales de 1 grado de libertad Parte II
• ESTÁTICA APLICADA: bielas paralelas en sistemas materiales de 1 grado de libertad Parte III
•Diagramas cartesianos de desplazamiento y aplicación al principio de los trabajos virtuales
•Diagramas cartesianos de desplazamiento en sistemas materiales de 1 grado de libertad
Imágenes y ecuaciones de autoría propia realizadas mediante LibreCAD y Microsoft Word. Tabla elaborada mediante Microsoft Excel.
Visite la etiqueta #STEM-espanol para encontrar contenido de calidad en habla hispana referente a Ciencias, Tecnología, Ingeniería, Matemáticas y otros tópicos relacionados. @STEM-espanol es una comunidad dedicada a la difusión de contenido en español referente a STEM (ciencia, tecnología, ingeniería y matemáticas por sus siglas en inglés) conformada por autores de todo el mundo.
Para mayor información y si deseas publicar contenido STEM acá está el enlace de invitación al canal de Discord de #STEM-espanol: https://discord.gg/UJwQXWP donde puedes presentarte y aclarar dudas.

STEMsocial es un proyecto en la plataforma Hive al cual #STEM-espanol está adscrito, cuyo objetivo es implementar un medio de comunicación STEM en Hive.
Ing. Angel Contreras
If you appreciate the work we are doing, then consider supporting our witness @stem.witness. Additional witness support to the curie witness would be appreciated as well.
For additional information please join us on the SteemSTEM discord and to get to know the rest of the community!
Thanks for having used the stem.openhive.network app and included @steemstem in the list of beneficiaries of this post. This granted you a stronger support.